- Каталог
- Вимірювачі-регулятори
- Пристрої контролю та керування
- Програмовані реле
- Програмовані логічні контролери
- Сенсорні панельні контролери
- Панелі оператора
- Модулі вводу/виводу
- Пристрої зв'язку
- Привідна техніка
- Блоки живлення та пристрої комутації
- Блоки живлення автоматного формфактору для пристроїв промислової автоматики
- Блоки живлення автоматного формфактору для датчиків
- Блоки живлення для ПЛК, модулів, сенсорних панелей і пристроїв автоматики
- Інтелектуальні блоки живлення зі зворотнім зв’язком для ПЛК, модулів, сенсорних панелей і пристроїв автоматики
- Акумулятори
- Блоки мережевих фільтрів
- Датчики
- Програмне забезпечення
- Архів продукції
- Електротехнічне обладнання Meyertec
- Про компанію
- OwenCloud
- Галузеві рішення
- Контрактне виробництво
- Партнери
- Сертифіковані системні інтегратори
- ФОП Знайдюк В.Г.
- ФОП Чікішев П. С.
- Інтелектуальні технологічні рішення
- ПП «Терфер»
- НВФ «АНТ Электронікс»
- ТОВ "ТПК "Теплотерм"
- ТОВ «РАЙЗ ІНЖИНІРИНГ»
- ТОВ «Електротехмаш»
- ТОВ «Технології Енергосистем України»
- Дніпропетровський інженерно-технічний центр «Контакт»
- ТОВ НПП «Центр Електромеханічної Діагностики»
- «ПромАвтоматика Вінниця»
- Дилери
- Сертифіковані системні інтегратори
- Підтримка
- Каталог
- Прайс-лист
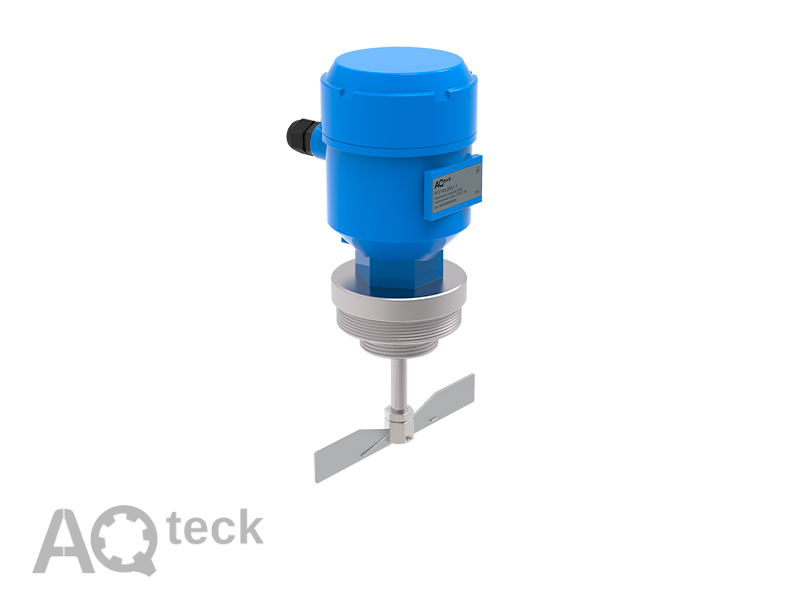
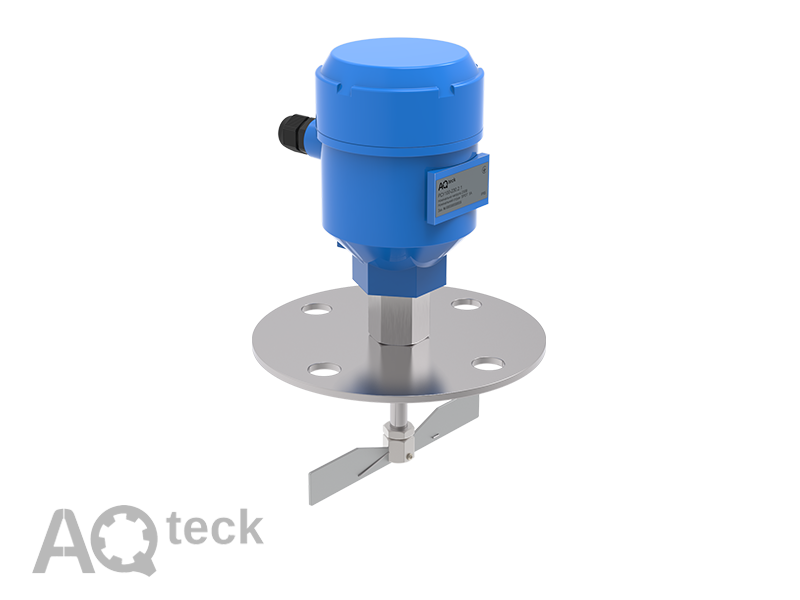
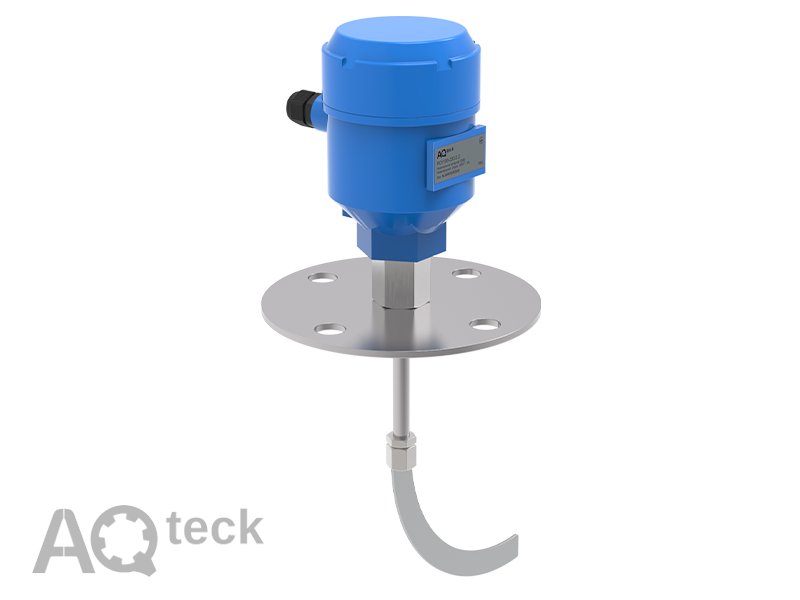
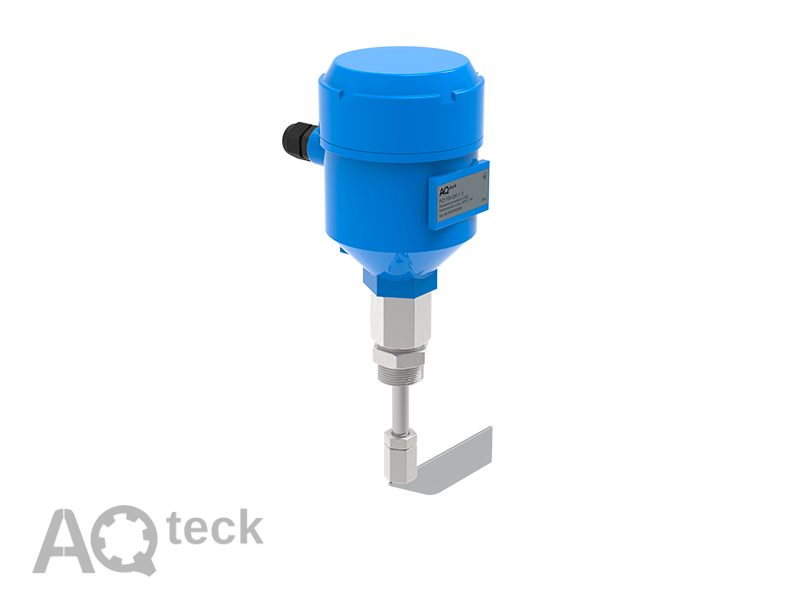
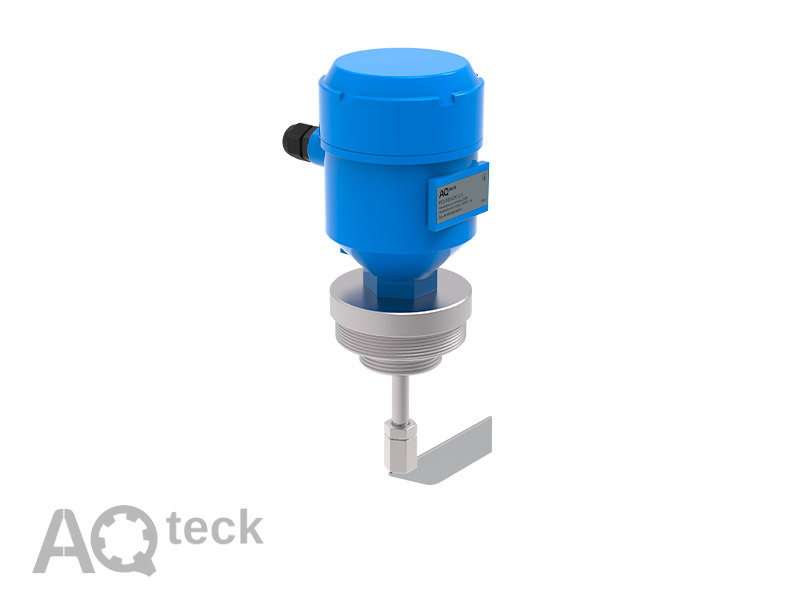
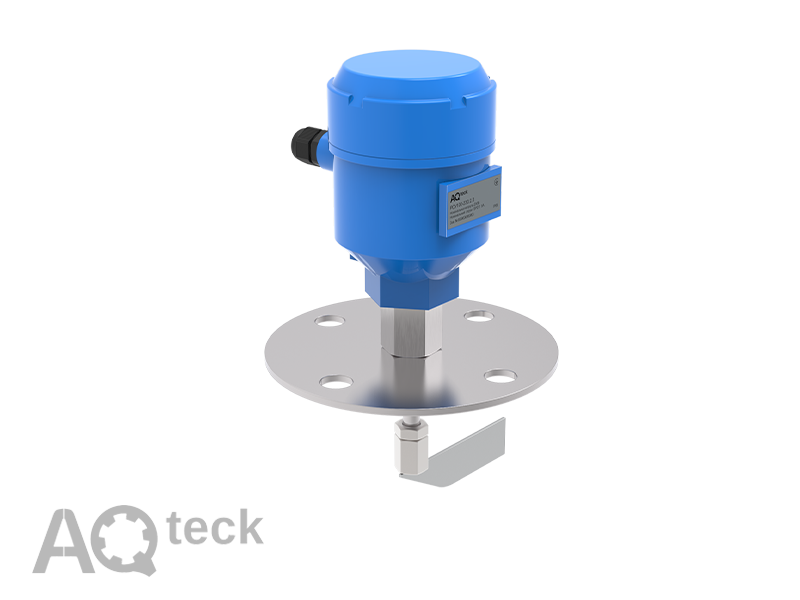
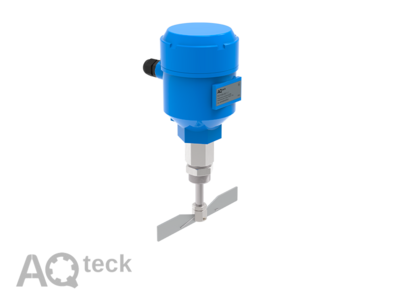
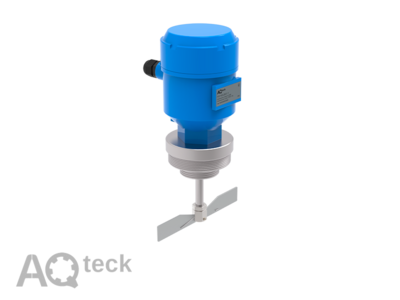
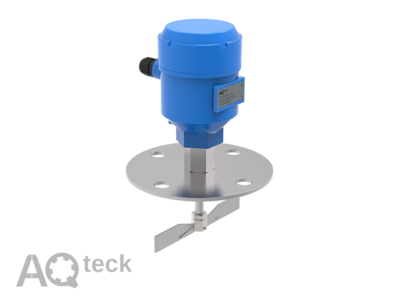
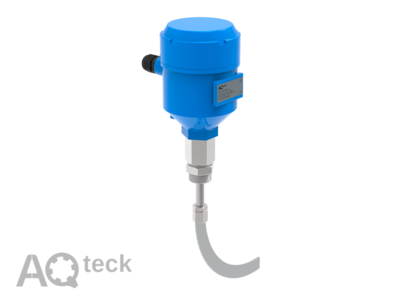
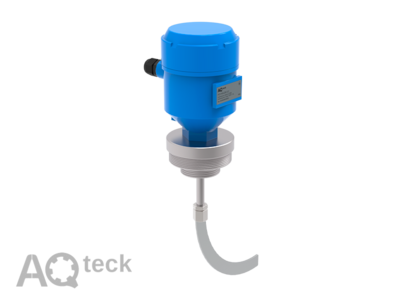
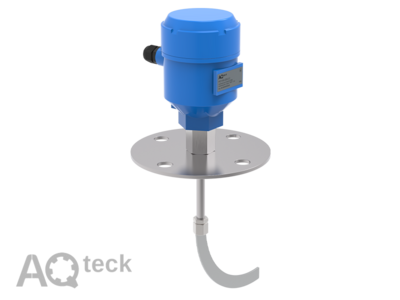
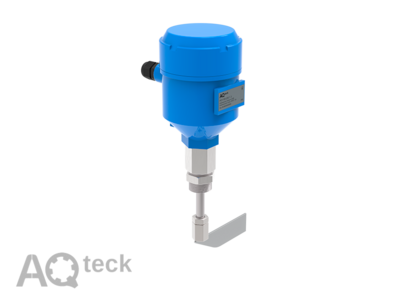
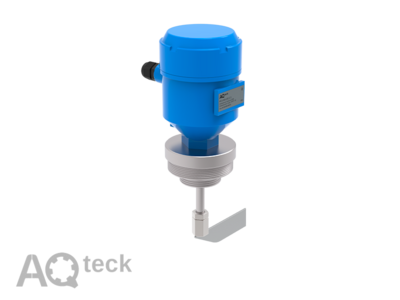
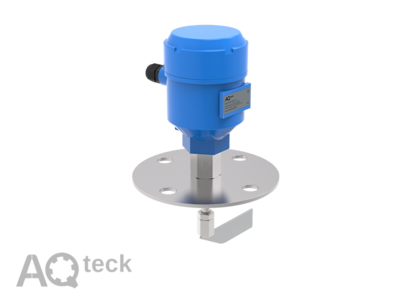
РСУ100. Ротаційний сигналізатор (датчик) рівня для сипких середовищ
Доступність: Стандартна модифікація
Від 6 120.00 грн (залежить від модифікації)
РСУ100. Ротаційний сигналізатор (датчик) рівня для сипких середовищ

Доступність: Стандартна модифікація
Від 6 120.00 грн (залежить від модифікації)
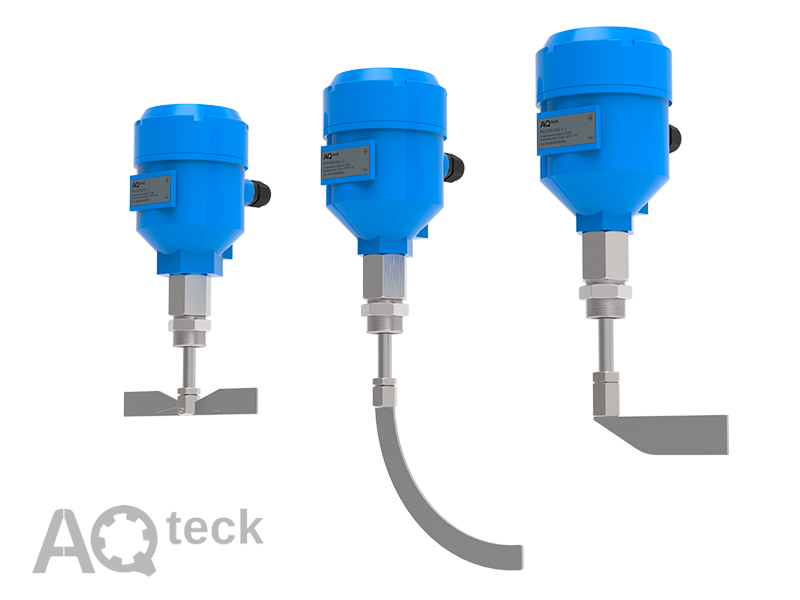
Ротаційний сигналізатор рівня РСУ100 призначений для контролювання рівня сипких матеріалів у промисловості та сільському господарстві. Датчик рівня ротаційний застосовується для сигналізації сипких матеріалів з щільністю середовища від 300 г/л.
РСУ100 – ротаційний сигналізатор рівня призначений для контролювання рівня сипких матеріалів у промисловості та сільському господарстві.
Принцип дії ротаційного сигналізатора заснований на виникненні реактивного моменту мотора, що вбудований в корпус датчика. Перетворювач оснащений лопатями, які обертаються зі швидкістю 1 об/хв. Коли продукт досягає рівня лопатей, він блокує їх обертання. На валу двигуна створюється реактивний момент, через що спрацьовує мікровимикач (реле) вихідного кола сигналізатора.
Особливість датчика – нечутливість до налипання робочого середовища. Датчик рівня ротаційний застосовується для сигналізації сипких матеріалів з щільністю середовища від 300 г/л.
Датчик рівня ротаційний РСУ100 можна використовувати з наступними речовинами:
- Сировина для виробництва виробів з ПВХ і ПЕТ (ПВХ-гранулят, ПЕТ-гранули);
- Різні будівельні матеріали (цемент, гіпс, готові сухі суміші, пісок, щебінь);
- Сипучі харчові продукти (борошно, цукор, крохмаль) ;
- Сільськогосподарська продукція (зернові культури, соняшник, комбікорми);
- Деревні сипучі матеріали (тирса, стружка, пелетні гранули).
РСУ100-230.1.1 рекомендується використовувати як аналог РСУ80-1.1.1.2.0,3Р.
Переглянути усі 3D 360° для інших модифікацій
Приклади застосування датчика рівня РСУ100
- Управління наповненням виконується наступним чином:
Якщо лопать датчика не стикається з матеріалом, то обертаючий момент передається від електродвигуна до редуктора, а від редуктора - до валу з лопаттю. Лопать вільно обертається в ємності.
Коли лопать стикається с матеріалом, вал сигналізатора зупиняється, а система «електродвигун-редуктор», долаючи опір пружини розтягування, приводить у дію мікроперемикач. Живлення електродвигуна вимикається, контакт датчика перемикається, і мікроперемикач видає сигнал на керування навантаженням.
Коли лопать РСУ100 звільняється від матеріалу, електродвигун вмикається і лопать знову починає обертатися.
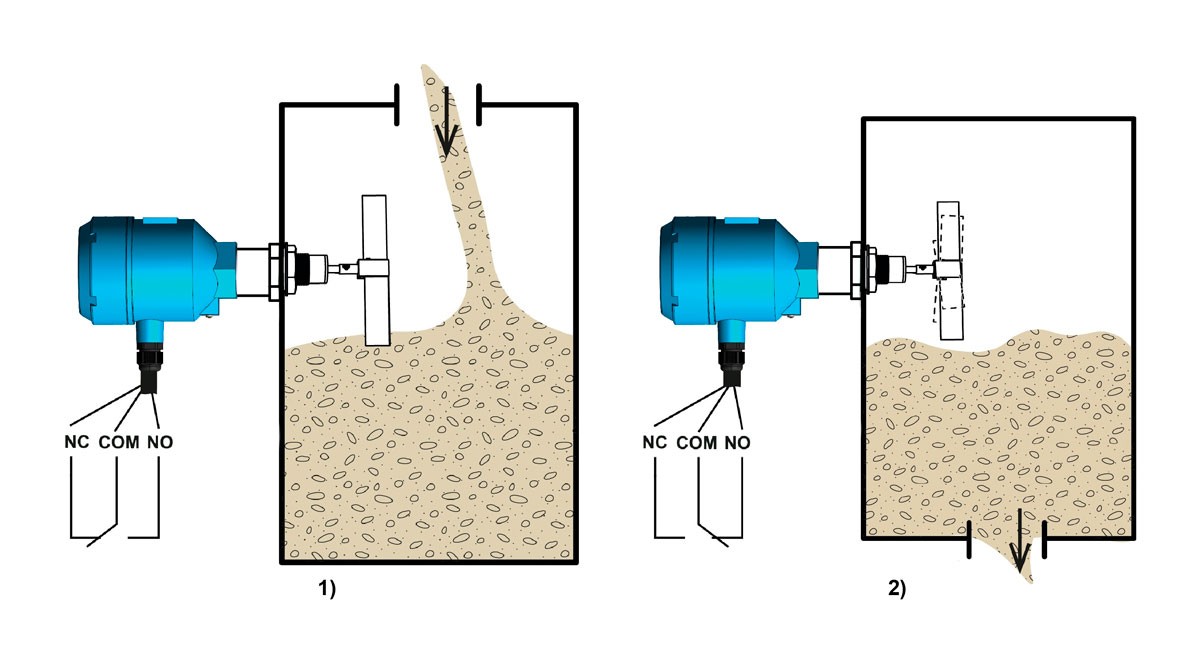
Спрацьовування мікроперемикача: наповнення (1); спустошення (2)
- Управління спустошенням має протилежну логіку спрацьовування:
Лопать ротаційного сигналізатора рівня РСУ занурена в сипкий матеріал. Як тільки лопать звільняється від матеріалу, тоді двигун датчики вмикається, лопать починає обертатися, мікроперемикач спрацьовує та видає сигнал на керування навантаженням.
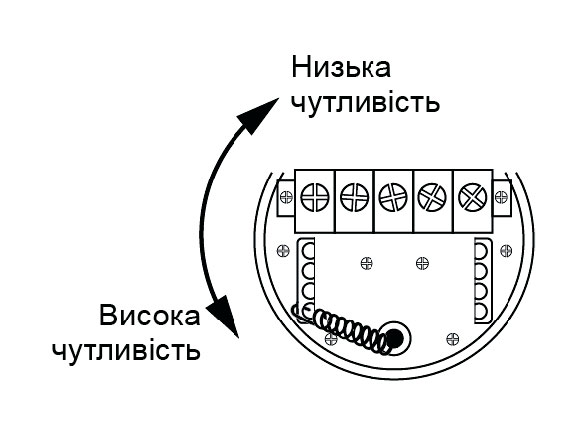
| РСУ має чотири регульованих положення чутливості. Чим нижче щільність сипучого матеріалу, тим більш високу чутливість необхідно обрати. Для регулювання чутливості необхідно:
|  |
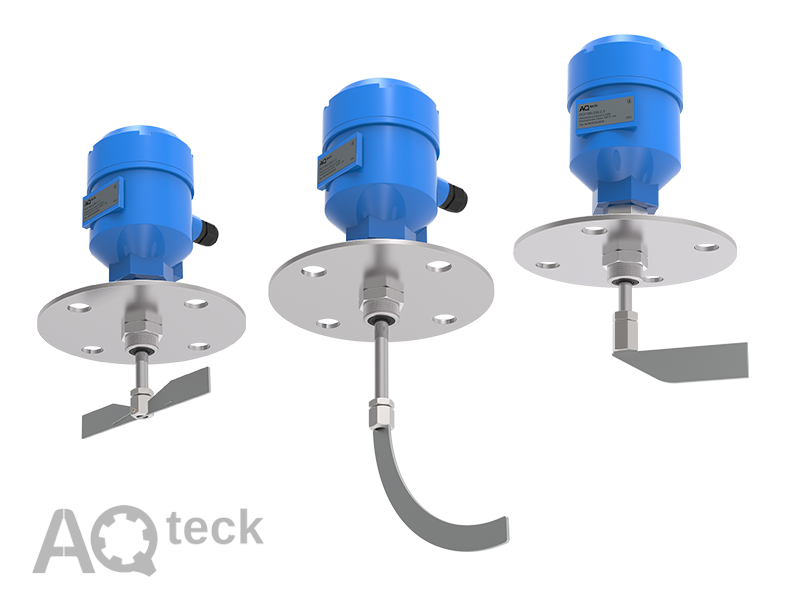
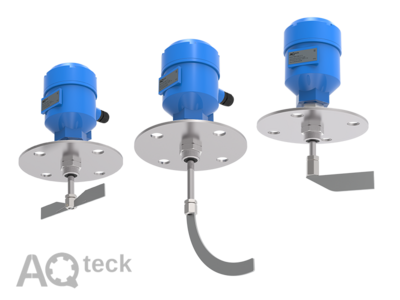
Монтаж сигналізатора рівня РСУ100
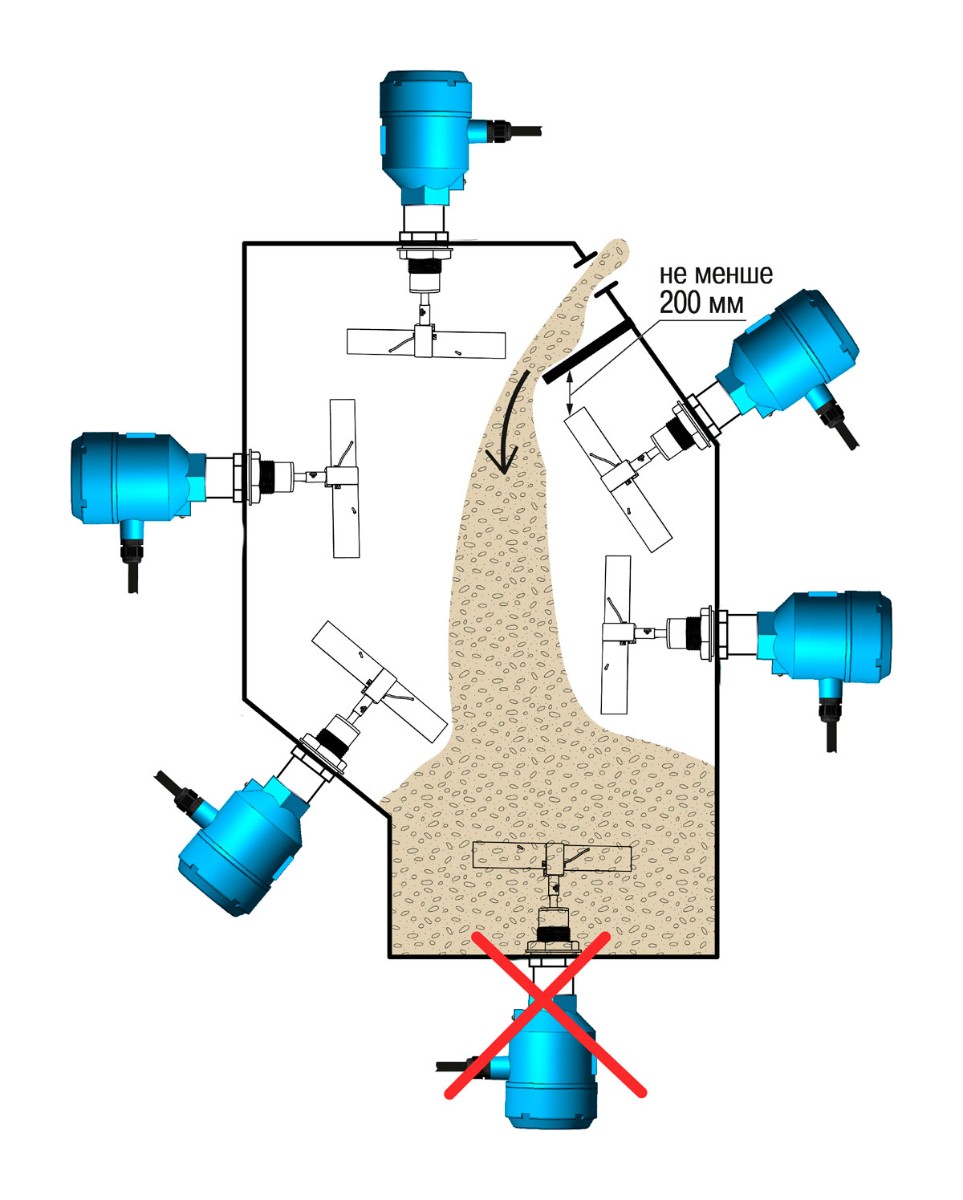
Розташувати датчик у резервуарі можна вертикально чи горизонтально, як показано на рисунку нижче. Для відстеження кількох рівнів одночасно рекомендується встановити кілька сигналізаторів РСУ100 у стінку одного резервуара.
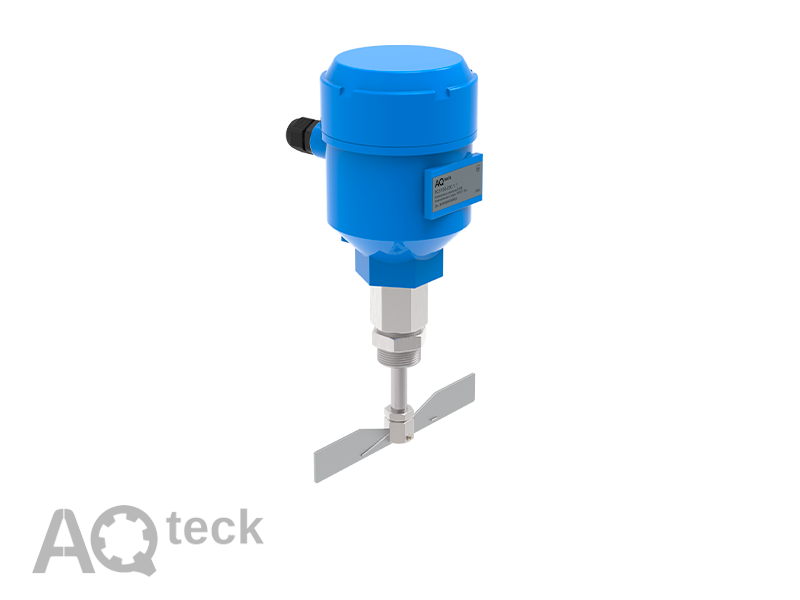
Монтаж РСУ може здійснюватися двома способами: з фіксацією контргайкою (1) або в бобишку (2).
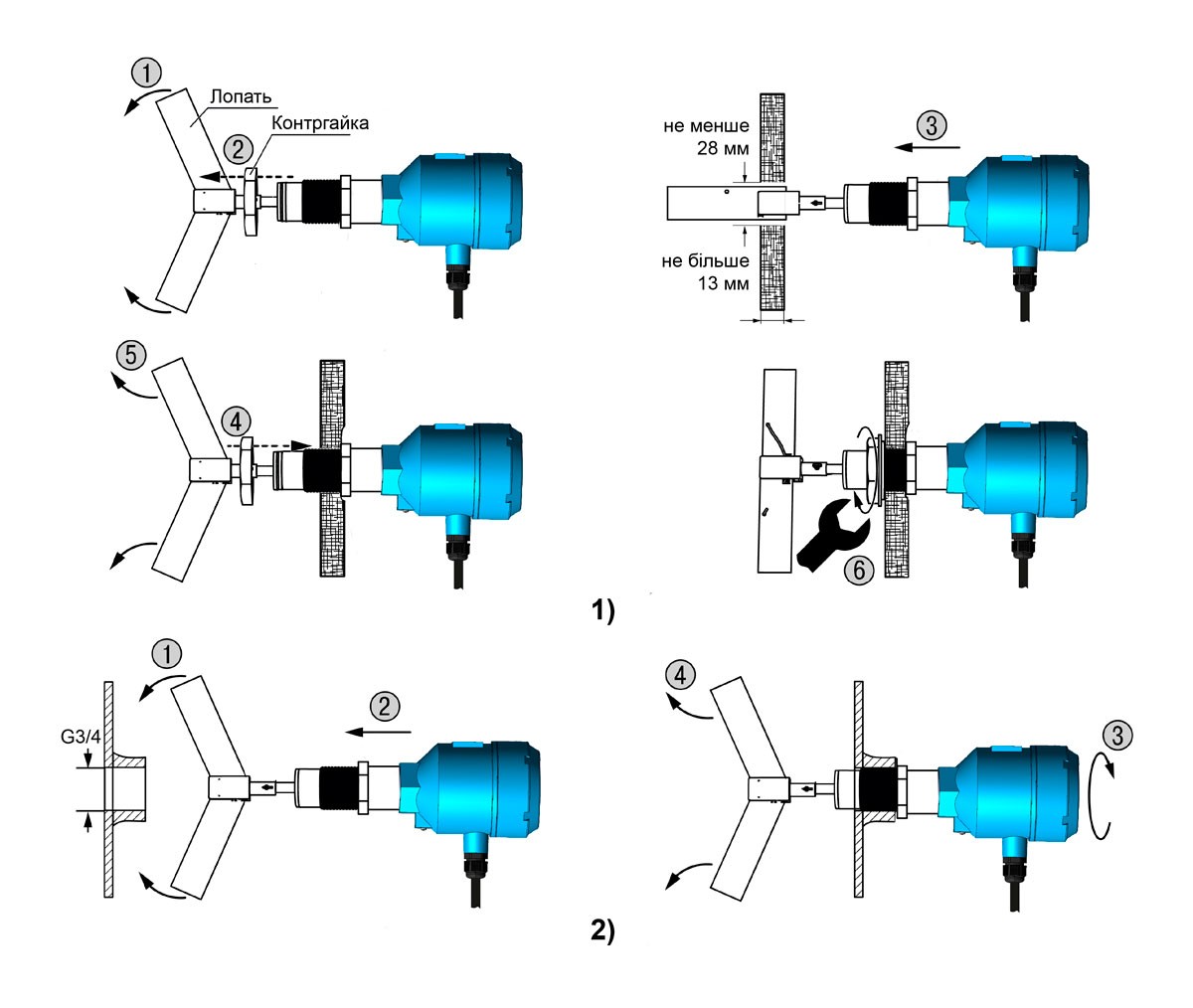
Для монтажу РСУ з фіксацією контргайкою слід (див. рисунок 1):
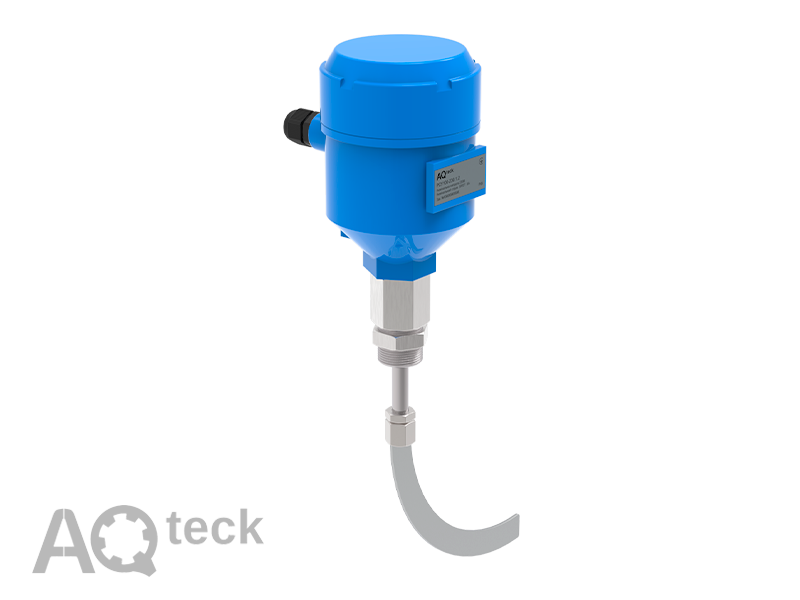
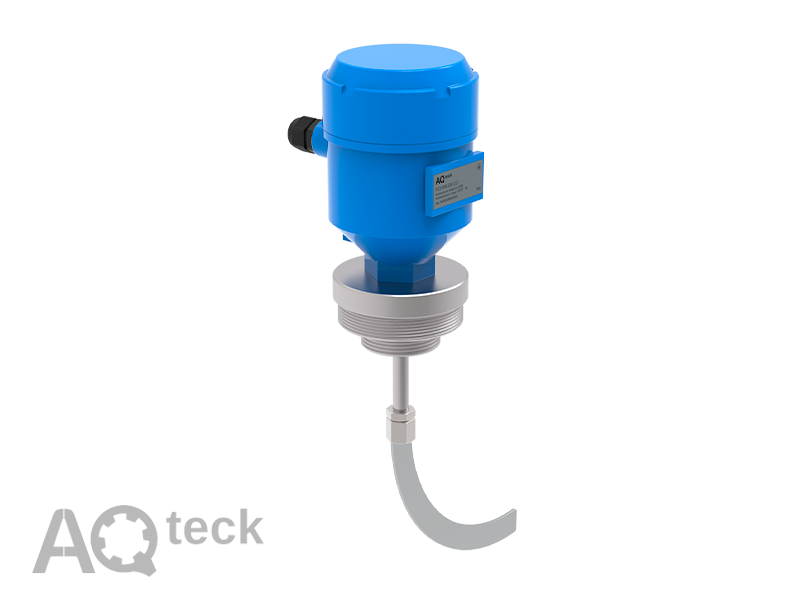
- Для виконання РСУ100-Х.1.1 – скласти лопать.
- Зняти з пристрою контргайку.
- Встановити пристрій у попередньо підготовлений в ємності отвір.
- Надіти на пристрій контргайку.
- Для виконання РСУ100-Х.1.1 – розкласти лопать.
- Закрутити контргайку за годинниковою стрілкою до упору.
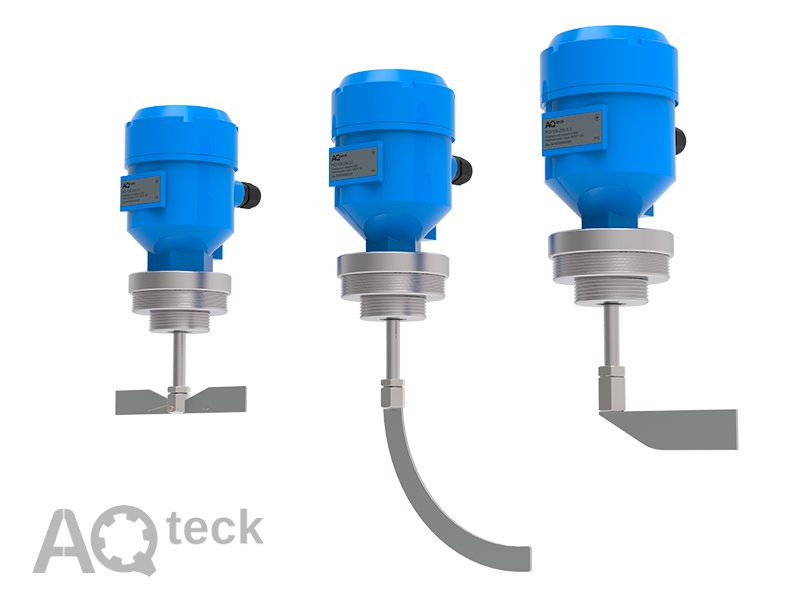
Для монтажу РСУ у бобишку слід (див. рисунок 2):
- Для виконання РСУ100-Х.1.1 - скласти лопать, а для виконання РСУ100-Х.1.2 – просунути її в монтажний отвір.
- Встановити пристрій у вузол приєднання з внутрішньою наріззю G3/4*.
- Вкрутити пристрій у бобишку за годинниковою стрілкою до упору.
- Для виконання РСУ100-Х.1.1 – розкласти лопать.
Аксесуари для ротаційних датчиків рівня
-
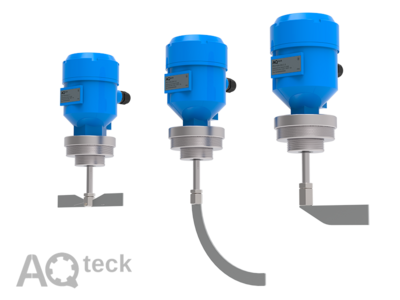
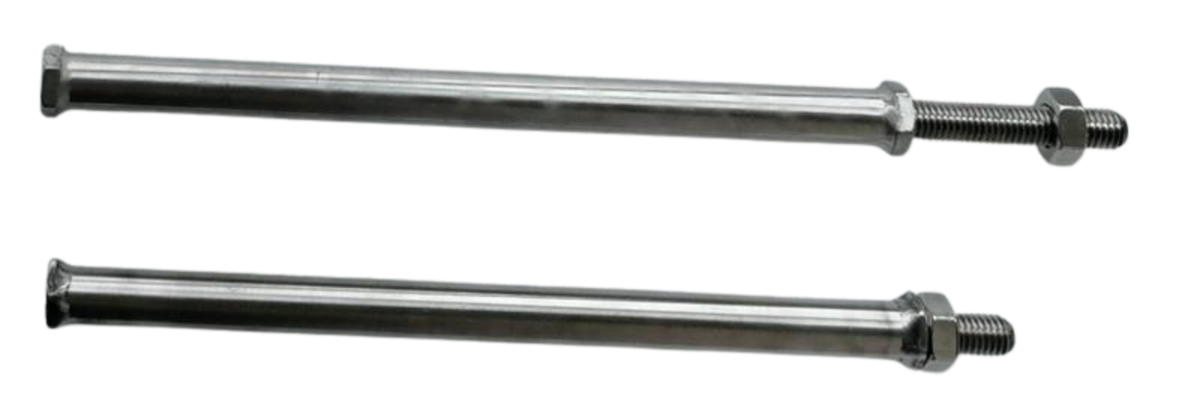
Подовжувачі штоку для РСУ100
Подовжувачі використовуються для нарощування довжини робочої частини ротаційного датчика рівня.
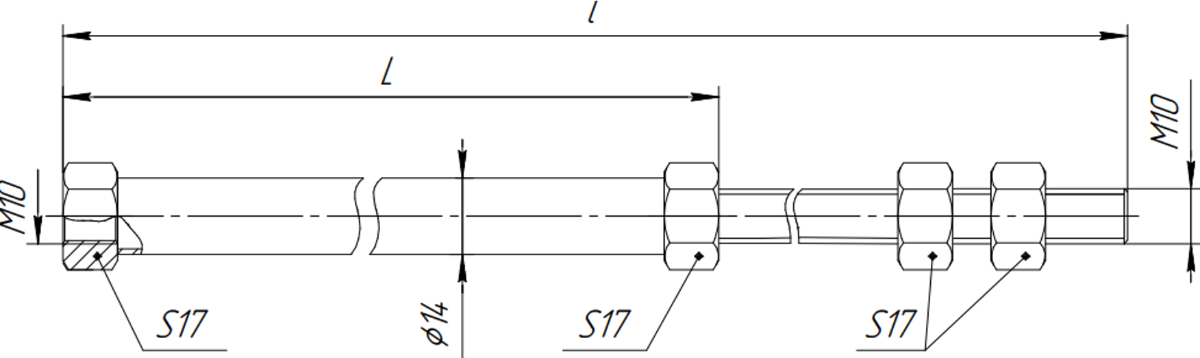
| Найменування | Довжина L, мм | Довжина l, мм | Матеріал |
| Подовжувач довжини штоку 100 - 200 | 100 | 200* | нержавіюча сталь AISI304 |
| Подовжувач довжини штоку 200 - 400 | 200 | 400* | |
| Подовжувач довжини штоку 400 - 800 | 400 | 800* | |
| Подовжувач довжини штоку 800 - 1000 | 800 | 1000* |
Зручна конструкція подовжувача дає змогу фактичну довжину нарощування налаштовувати в процесі монтажу датчика РСУ шляхом «вкручування / викручування штоку в трубці».
Подовжувачі штоку в маркуванні мають дві довжини L та l.
L – це довжина подовжувача в закрученому вигляді,
l – це довжина в максимально викрученому вигляді.
* рекомендуємо використовувати l не більше 70-75% від максимальної довжини.
Використання подовжувачів штоку збільшує спектр використання ротаційних сигналізаторів рівня РСУ та спрощує монтаж на об’єкті.
